有许多结构贯穿我们的城市,大多数人都看不到。需要有结构将我们的废水、雨水和饮用水输送到处理设施和水源地,以及从源头引出。这些结构需要定期检查以确定它们的寿命和状况,以便做出有根据的维修决定。修复这些结构并不像修复建筑物和道路那么容易,因为它们位于许多其他结构之下,并且涉及许多活动部件来执行这些修复。进行检查以确定结构状况、沉积物水平等。检查可以通过潜水员、密闭空间进入、挖掘或机器人车辆进行。

为什么使用水下机器人进行水下基础设施检查?
对于完全淹没的管道和隧道检查,水下机器人是一种出色的工具。在某些环境下,例如水体浑浊或隧道直径较大时,仅依靠摄像头很难进行彻底的检查。有限的可见性会使识别缺陷变得困难。操作员可以驾驶 ROV 靠近隧道的墙壁、顶部和底部以获得足够清晰的图像,但这可能意味着多次通过,并且可能无法提供足够的数据,例如了解隧道中的沉积物水平。
以下是选择 ROV 进行隧道检查时要考虑的一些因素:
- 管道的长度和直径
1、直径越小,水下机器人体积要更小;
2、更大的管道直径,可能需要成像声呐(仅依靠灯光和摄像头无法为操作员提供足够的参照来进行彻底的检查);
3、更长的隧道/管道,可能需要更强大的水下机器人平台或成像声呐来帮助提高检查效率;
- 接入点
1、接入点大小,考虑机器人平台的大小
2、接入点数量,考虑脐带缆的长度
3、接入点位置,考虑整套设备的便携性
- 所需数据类型
1、一般目视检查可以用一个简单的相机和灯完成;
2、声呐有助于在浑浊的水中获得一般的视觉效果;
3、沉积物测量需要使用声呐
4、在管道中的位置,需要通过脐带缆测量
使用声呐和ROV进行水下基础设施检查的好处
通过给水下机器人配置成像声呐,操作员可以更好的了解管道的整体状况,并可以识别以下缺陷:
隧道状况
1、形变
2、椭圆度
3、腐蚀
- 缺陷的大小和类型
1、开裂和点蚀
2、折叠
3、脱节和分离
障碍物
1、沉积物水平
2、异物(建筑材料、树根等)
3、突出的侧面
发现这些缺陷有助于做出修复决策。并非所有缺陷都需要立即关注。通常,这些成为以后评估的兴趣点。目标是识别随时间的变化,看看缺陷是迅速恶化还是缓慢恶化。如果缺陷处于临界点并且严重程度不断增加,则需要立即采取修复措施。然而,从成本的角度来看,同样重要的是,能够缩小不需要关注的缺陷范围有助于减少不必要的维修支出。在您的团队中使用易于操作的 ROV 的好处是,几乎任何操作员都可以重新审视这些缺陷。
水下管道检测案列
- 任务目标
该案例的作业目标是评估某市的一条下水道的状况,该管道检测机构需要提供管道的评估报告,以确定对管道的后续维护作业安排。由于这是一条长530米、完全被水淹没的管道。因此选择了我们的S100水下机器人扩展成像声呐版本来完成本次作业任务。
- 使用的设备
S100水下机器人
S100水下机器人,是我们的主力机型,六推布置,五个自由度。搭配了一台成像声呐,即使水很混浊,也可以让操作员轻松看到。声呐操作员能够以一种远超传统侧扫甚至机械扫描声呐效果可视化的观察周围环境。
英国Blueprint Subsea Oculus M1200D多波束成像声呐
M1200d声纳型号名称中的“d”表示它是双频声纳,因此您可以在低范围、高频、高分辨率模式和广角视图之间切换,即低频模式. 低频模式提供更大的范围和更宽的视野。高频模式最适合近距离检查缺陷以进行精确测量,低频模式最适合隧道的一般视图。只需按一下按钮即可在两种模式之间切换。在这次检查中,首先以低频模式,较高的速度穿过隧道,以便快速了解情况,寻找大型障碍物。在高频和高分辨率下,较慢的通过,以专注于较小的缺陷。
解读声呐图像
S100水下机器人,搭配多波束成像声呐扩展架,使用一个水下俯仰机构,可使声呐上下俯仰。
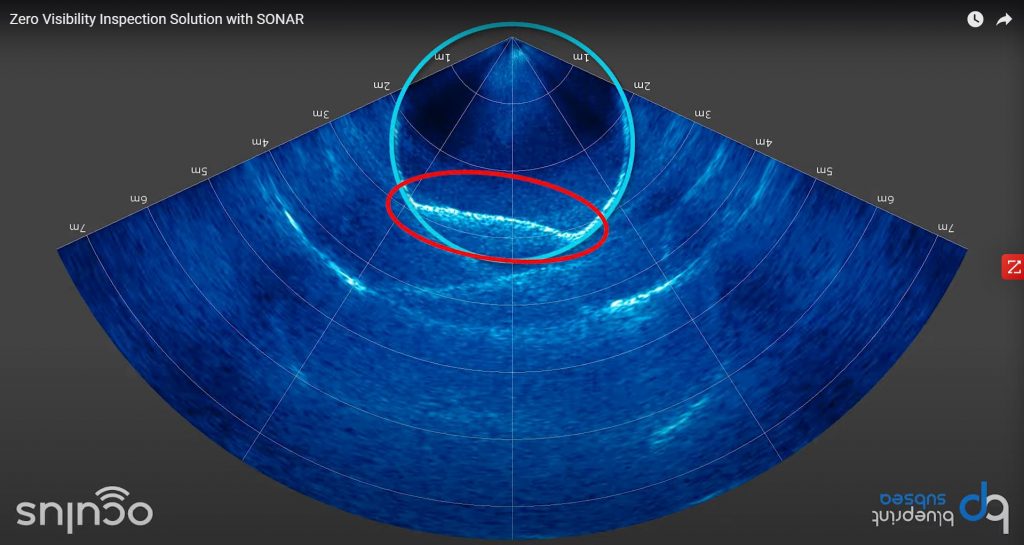
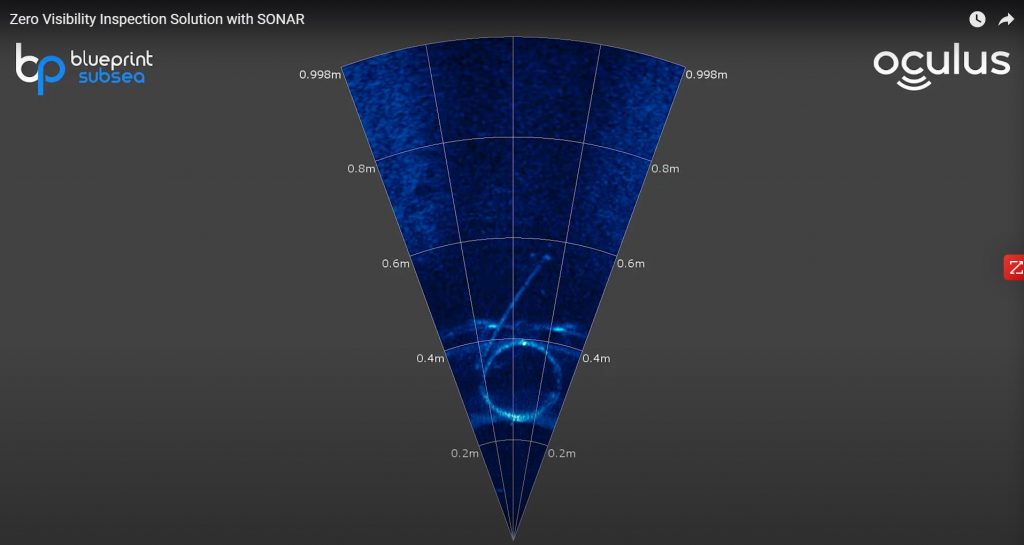
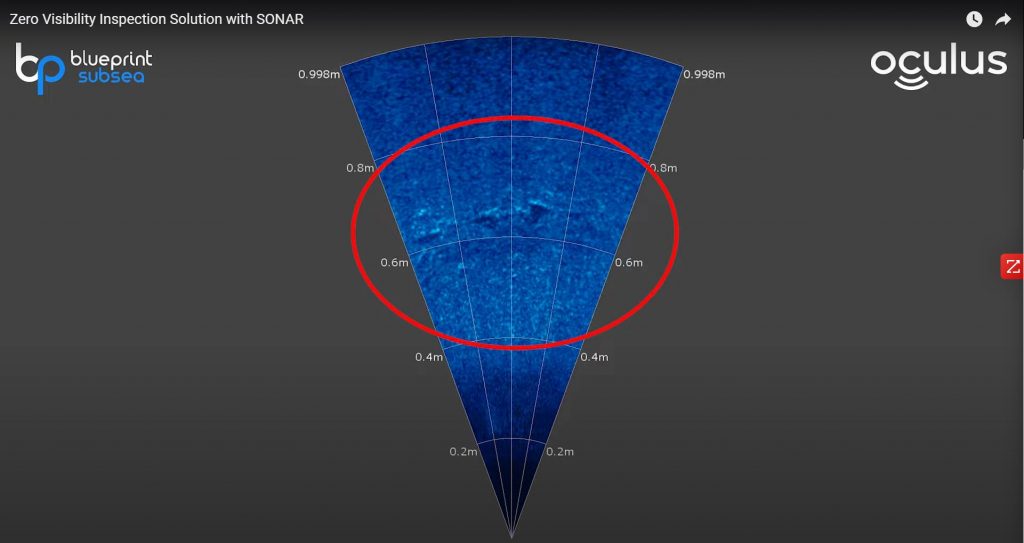
使用声呐查看小伪影(气泡),下图
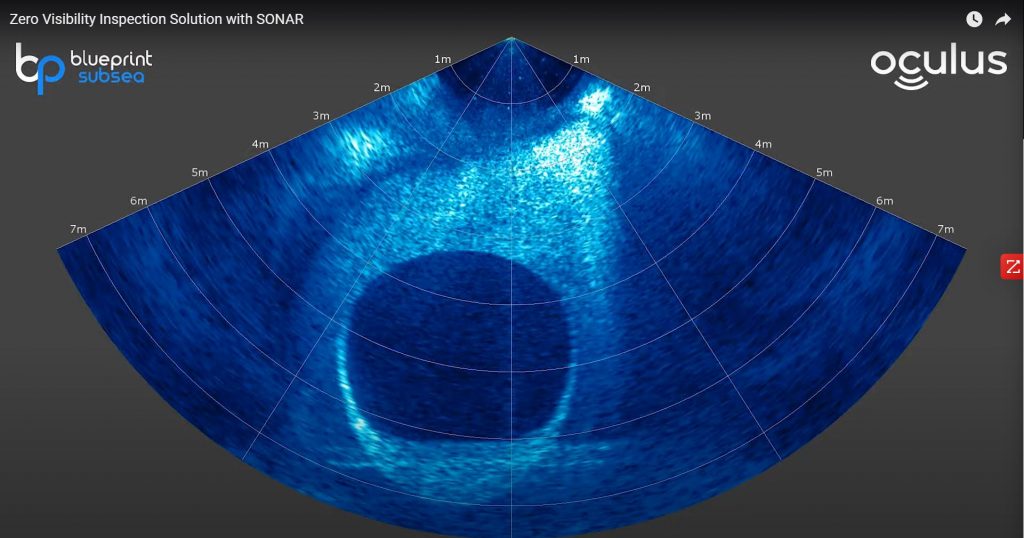
使用成像声呐获取管道横截面并查看沉积物
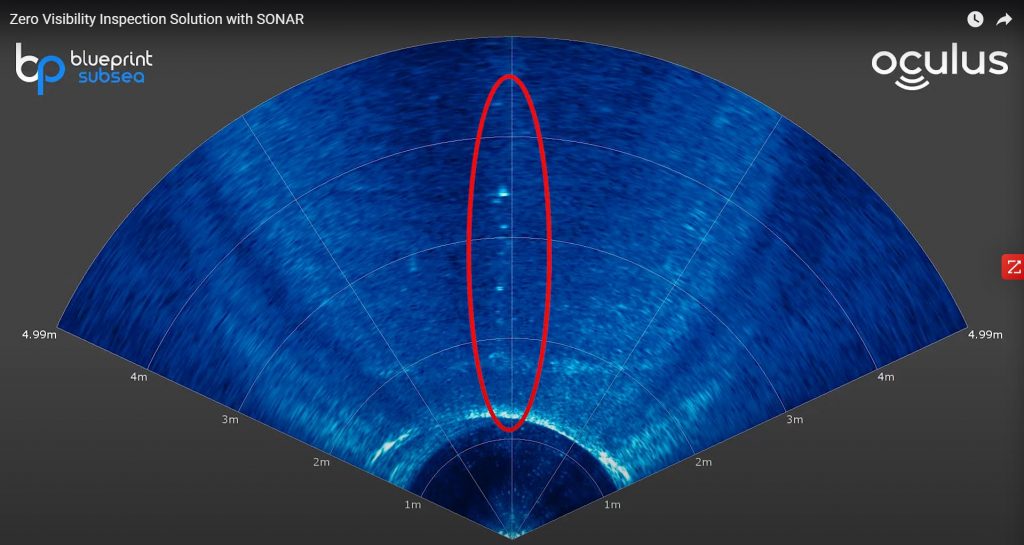
使用成像声纳识别小缺陷
成像声纳是一种非常通用且功能强大的选择,适用于许多不同的应用,而不仅仅是隧道检查。它们通常被 ROV 操作员称为 ROV 上最重要的传感器。Blueprint 成像声纳是管道检查的绝佳工具,但不是唯一的选择。我们已经看到Imagenex 831L 管道剖面仪和机械扫描声纳也用于提供有价值的隧道检测数据。这些扫描声纳不提供对小缺陷做出状况评估决策所需的详细数据,但它们是确定管道总体状况、收集椭圆度、沉积物水平和识别主要缺陷的绝佳工具。
使用这种技术一开始可能会让人望而生畏,但是一旦你有一点第一手实践,它就会变得更容易。为您的项目确定正确工具的重要部分是了解检查的最终目标是什么。
如果您需要帮助为您的任务寻找合适的技术,请联系我们的机器人专家,为您的应用和预算找到合适的选择。我们很乐意提供帮助。
